Except, you can. Read on.

One way around the following error that inevitably results from finite system bandwidth is to sample position simultaneously with acquiring your other data using a deterministic, low-latency interface such as the analog, SPI or parallel I/O (PIO) interfaces offered on our controllers. This means you always know the exact position at which your data was acquired, so if the stage doesn't track your desired waveform perfectly at high speeds, it might not matter. A good example of a fast application enabled by this trick is our CyberAligner Modular Alignment Workstation targeted at characterization and packaging automation applications for waveguides and other fiber-coupled devices.
But this is not always an optimal solution. Perhaps the application demands that data be equally spaced in both position and time, or perhaps the quantity being measured can vary with instantaneous velocity (an example being current generated by moving a nanocoil probe over a sample containing small magnetic features). For such applications, there is no substitute to improving the fidelity of the position waveform. But conventional closed-loop servo technologies cannot address limited system bandwidth and often contribute significantly to it.
We offer two unique solutions:
- Advanced Piezo Control, a proprietary servo algorithm which is optional on our top-of-the-line E-712 digital nanopositioning controller. This technology is ideal for virtually eliminating following error in tracking applications where the stage path is not predefined.
- Dynamic Digital Linearization, a technology available in most of our digital controllers (the link is to the "Methods to Improve Piezo Dynamics" article in our Piezo University). This technology can reduce the following error of repetitive scan waveforms down to the system noise level. For highly-leveraged stages with inherently low resonant frequency, the improved dynamic accuracy can be remarkable.
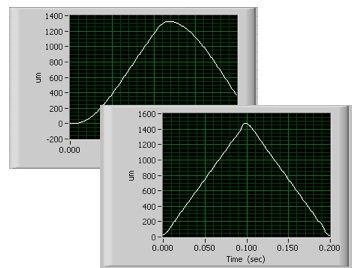 |
| Full 1.5mm piezo scan showing enhanced dynamic accuracy/reduced following-error from Dynamic Digital Linearization |
This has proven to be an enabling technology for this and other applications in fields as diverse as semiconductor metrology, defense and clinical life sciences, where rapid scanning requirements increasingly include previously unapproachable dynamic accuracies over long travels.
More information on Methods to Improve Piezo Dynamics